ロケットをエンジンの推力で下から押すと、ひっくり返ってしまいそうなものである。倒れずにまっすぐに飛び続けられる理由について説明してみる。
自分が子供の頃に最も納得できた例えは、ホウキを立ててバランスさせる遊びである。
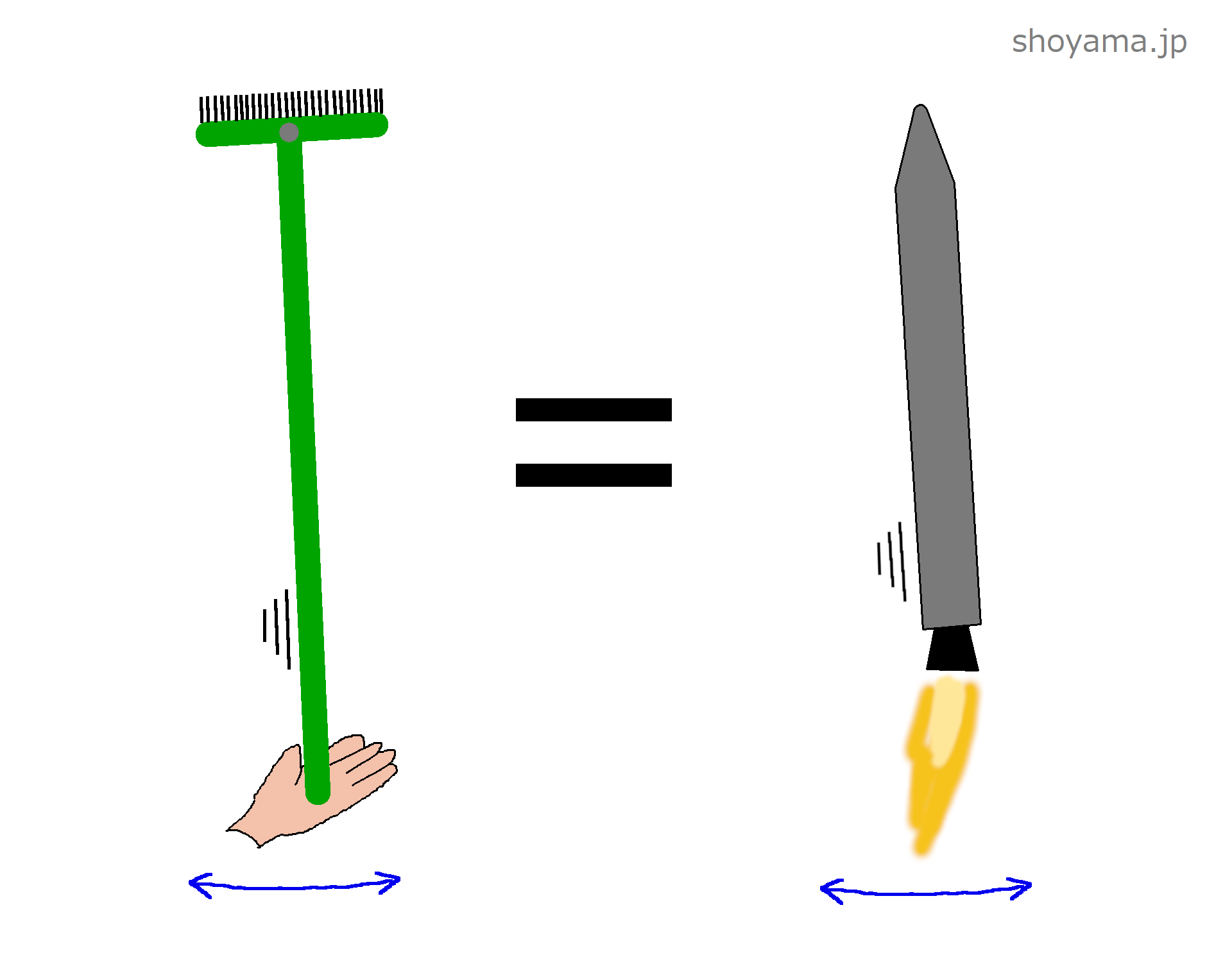
今でも小学生は教室のホウキでこのような遊びをしているそうだが、ロケットを倒さないようにロケットエンジンの噴射方向を制御することは、これと全く同じである。
ホウキが倒れないようにするためには、ホウキの先端部を注意深く見ながら、頻繁に手のひらを動かす必要がある。ロケットの姿勢制御でも同様に、機体の倒れを検知しながら、遠目には見えない小さい角度(最大でも10度くらい)でノズルを細かく左右に振っている。
観測ロケットのように尾翼安定方式の場合は、エンジンのノズルが固定されていて制御できない代わりに、尾翼によって風見鶏が必ず風上方向を向く原理(風見安定)を用いている。
先端が重い方が制御しやすい
ホウキの遊びから経験的に分かるのが、上図のようにホウキの毛先を上側に倒立した方が、逆に毛先を持って持ち手を上側にする場合よりも、上手く立て続けられる。
これは毛先の重さによって、ホウキの重心が手から遠くなるためである。これにより、制御モーメントが増すため、倒れが大きくなる前にすぐに修正できるようになる。
同じことがロケットでも言える。ロケットの設計を行う際、重心位置は非常に重要である。ロケットの質量の90%以上を占める燃料が満載の発射直後は、ロケットの重心は先端の方にあるが、発射後、燃料が消費されていくと先端の方から空になっていく場合(必ずしもそうなるわけではないが)、時間と共に重心位置は後ろに下がっていく。どんどん制御し難くなっていくのである。
先端が重い方が制御しやすいのは、観測ロケットのような尾翼安定方式でも同様である。ロケットの重心位置が、尾翼を含めた風圧中心よりも常に先端側にあることを設計上保証する必要がある。その余裕のことを静安定マージンと言い、両者の距離を機体全長で割ったパーセントで表現する。